Du fait des multiples applications potentielles (notamment thérapeutiques), l’intérêt pour le développement de biorobots s’est accentué au cours des dernières années. Dans un précédent article, Inneance relatait une expérimentation aboutissant à la création des premiers robots vivants créés à partir de cellules souches de grenouille. Ces « xénorobots » de moins d’un millimètre de long sont capables de se déplacer de façon autonome, de survivre pendant plusieurs semaines sans nourriture, de collaborer entre eux, et même de s’autoréparer en cas de dommage. Des équipes de chercheurs américains de l’université Tufts (Medford), Harvard (Boston), et l’Institut Technologique du New Jersey (Newark) ont récemment annoncé avoir réussi à concevoir des biorobots fabriqués cette fois-ci à partir de cellules humaines. Ces biorobots sont par ailleurs capables d’intervenir dans la guérison de tissus nerveux.
Les applications potentielles des biorobots sont multiples. À terme, ceux-ci pourront certainement être employés en médecine thérapeutique afin de transporter des médicaments dans le corps humain ou soigner des artères, par exemple. En médecine régénérative, ils pourraient intervenir dans la cicatrisation de plaies inaccessibles autrement que par intervention chirurgicale.
Cependant, pour que les biorobots puissent être utilisés dans un cadre médical, il est nécessaire que ceux-ci soient biocompatibles. Aussi les chercheurs ont-ils tenté de développer des biorobots (dénommés anthrobots) issus de cellules épithéliales de poumons humains. Les cellules isolées ont été cultivées au sein d’un milieu de culture élaborée de telle sorte que chaque cellule puisse se diviser en une structure multicellulaire et prendre une forme sphéroïde bordée de cils. Environ 6 jours après la mise en culture, les chercheurs ont constaté que les amas cellulaires se déplacent grâce à la présence de leurs cils et peuvent survivre 4 à 6 semaines.
1. Les morphotypes
Les chercheurs ont constaté que les anthrobots peuvent adopter des morphologies distinctes et ont identifié 3 morphotypes principaux (Figure 1). Chacun de ces morphotypes présente une couverture ciliée plus ou moins polarisée et est associé à différentes capacités de motilité (circulaire, linéaire, et curviligne). Les chercheurs ont également identifié que les trajectoires circulaires sont les plus stables dans le temps comparativement aux trajectoires curvilignes et rectilignes. C’est-à-dire que les anthrobots se déplaçant de manière circulaire ont tendance à conserver ce mode de déplacement. Par ailleurs, les trajectoires de déplacements sont conservées au sein de chaque morphotype et la probabilité qu’un morphotype passe d’une trajectoire circulaire à une trajectoire linéaire est très faible.
Les chercheurs ont également identifié une relation existante entre la morphologie de l’anthrobot et ses trajectoires de déplacements. Ainsi, le morphotype 2 se caractérise par des trajectoires de déplacements linéaires, tandis que le morphotype 3 se déplace de manière circulaire. Ces différences de trajectoires de déplacements peuvent notamment s’expliquer par les différences de polarisation des couvertures ciliées. En effet, la polarisation marquée de la couverture ciliée du morphotype 3 doit générer une force de propulsion dissymétrique induisant un déplacement circulaire.
Les trajectoires de déplacements ont également été analysées pour le morphotype 1, mais du fait de sa forme sphérique associée à une couverture ciliée uniformément distribuée, celui-ci ne se déplace quasiment pas. En effet, les forces de propulsion générées par le mouvement de leurs cils sont plus susceptibles de s’annuler en raison de leur forme sphérique, entraînant peu ou pas de mouvement.
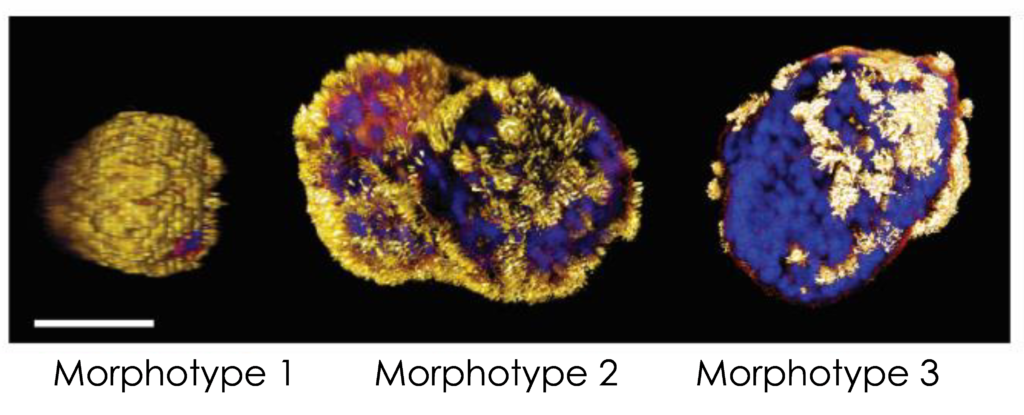
Figure 1 : Les 3 morphotypes principaux d’anthrobots identifiés par les chercheurs. Les anthrobots de type 1 sont petits, de forme régulière, uniformément couverts de cils. Les anthrobots de type 2 et 3 sont plus gros et de forme plus irrégulière. La couverture ciliée est plus disparate, et les anthrobots de type 3 présentent une couverture ciliée nettement plus polarisée (Échelle 50μM). ©Gizem Gumuskaya.
2. La traversée des tissus
Dans le cadre de futurs applications biomédicales, les chercheurs ont également étudié le comportement des anthrobots dans des environnements différents de ceux auxquels leurs cellules constitutives (épithélium de poumon humain) sont confrontées nativement in vivo.
Plus précisément, les chercheurs ont étudié la capacité des anthrobots à traverser des tissus vivants. Pour cela, ils ont placé les anthrobots au contact de tissus neuronaux endommagés (sur lesquels une plaie avait été pratiquée). Ils ont alors mis en évidence que les anthrobots sont capables de traverser le tissu détérioré.
De plus, ils ont découvert que les anthrobots qui ont des trajectoires de déplacements circulaires et/ou une vitesse de déplacement plus élevée que les autres sont de meilleurs « explorateurs » et qu’ils couvrent un pourcentage plus élevé de la surface du tissu sur le site de la plaie.
3. La réparation des tissus
L’équipe de recherche a également étudié l’effet de la présence des anthrobots sur des tissus endommagés. Pour ce faire, les chercheurs ont tout d’abord associé plusieurs anthrobots dans un espace restreint afin de faciliter leur agrégation et d’obtenir des « superbots ».
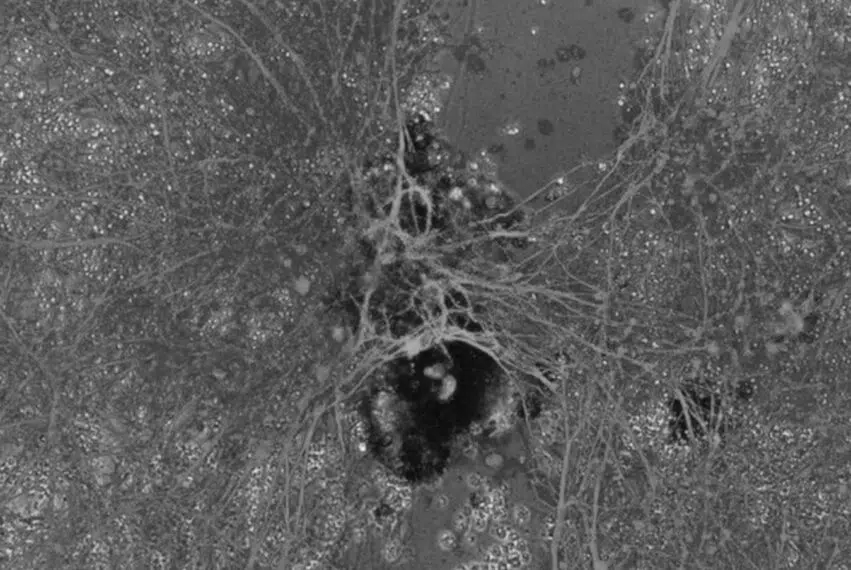
Ces superbots ont ensuite été placés sur un tissu vivant lésé (formé de cellules neuronales humaines), de façon à couvrir toute la largeur de la blessure (Figure 2). 72 heures après l’inoculation des superbots (dans la déchirure tissulaire), les chercheurs ont observé une repousse du tissu natif jusqu’à former un point de contact juste en dessous du pont formé par les superbots (Figure 3).
Dans la mesure où la cicatrisation a été observée uniquement sur les sites d’inoculation des superbots et à aucun autre endroit de la lésion, ceci suggère que les assemblages d’anthrobots induisent une guérison de tissus nerveux vivants.
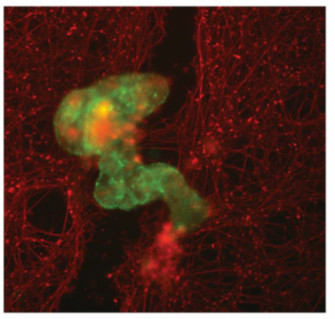
Figure 2 : Coloration immunologique d’un pont de superbots (en vert) couvrant la largeur de la lésion du tissu neuronal (rouge). ©Gizem Gumuskaya.

Figure 3 : Coloration immunologique des neurones fixés au jour 3 après l’introduction des superbots au niveau de la déchirure du tissu lésé, montrant une réparation neuronale induite au site d’ensemencement des superbots (flèche rouge) (Échelle 500uM). ©Gizem Gumuskaya.
4. Conclusion
Ces recherches laissent apparaître que le génome humain code du matériel cellulaire ayant un potentiel morphogénétique, comportemental et fonctionnel allant bien au-delà de ce que l’on observe habituellement in vivo — ce qui ouvre la voie à toute une gamme d’applications biomédicales.
De fait, les anthrobots dérivés de tissus humains adultes pourraient à l’avenir être personnalisés pour chaque patient, permettant un déploiement in vivo de ces robots dans le corps humain sans risquer de provoquer des inflammations ni de déclencher de réponse immunitaire.
Une fois inoculés dans le corps par l’intermédiaire de méthodes peu invasives (telle qu’une injection), de nombreuses applications peuvent être imaginées telles que l’élimination de l’accumulation de plaques dans les artères des patients atteints d’athérosclérose, ou le dégagement de l’excès de mucus des voies respiratoires des patients atteints de mucoviscidose ou encore l’administration locale de médicaments.
À l’avenir, ces équipes de recherche de Medford, Boston et Newark envisagent de construire des anthrobots à partir d’autres types de cellules afin d’explorer leurs comportements dans différents environnements et ainsi de découvrir potentiellement d’autres capacités à ces biorobots.
