Le premier robot « vivant » créé à partir de cellules souches de grenouille a récemment vu le jour. Des chercheurs de l’université Tufts et de l’université du Vermont aux Etats-Unis ont réussi à créer des robots à partir de cellules souches de grenouille. Ces « xénorobots » mesurent moins d’un millimètre de long et sont capables de se déplacer de façon autonome, de survivre pendant plusieurs semaines sans nourriture et de collaborer entre eux
C’est l’une des expérimentations les plus étranges qui ait été faite récemment : des biologistes et des roboticiens de l’université Tufts et de l’université du Vermont, aux États-Unis, ont créé des machines à l’aide de cellules vivantes.
Les robots ont été conçus par un algorithme évolutionniste. Les algorithmes évolutionnistes utilisent des méthodes qui permettent de trouver des solutions proches des optima globaux pour des problèmes complexes, mais dans un temps beaucoup plus court que . Ces algorithmes sont dits « évolutionnistes » car leur principe s’inspire (librement) des fondamentaux de la théorie de l’évolution. Les algorithmes évolutionnistes utilisent les mêmes principes que l’évolution naturelle, la compétition entre individus, pour créer des systèmes complexes pouvant s’adapter à de nombreuses situations. Cela permet d’optimiser efficacement un dispositif physique, par exemple, en explorant l’espace des solutions sans pour autant avoir à supporter un coût démesuré.
Ces algorithmes manipulent des populations de solutions. Les solutions jouent donc le rôle des organismes individuels d’une population. L’ensemble des solutions possibles à un problème donné est d’abord , sous forme d’une population de solution. Puis l’algorithme est itéré un nombre fini de fois jusqu’à atteindre un critère d’arrêt. La population est ensuite testée pour son aptitude à résoudre un problème correctement et rapidement. Enfin, les individus les plus adaptés à résoudre le problème donné sont sélectionnés pour la reproduction et le cycle recommence : le degré d’adaptation de la population (de seconde génération) est évalué et testé, et ainsi de suite.
Dans le cas des xénorobots, le programme commence par générer des configurations 3D aléatoires de 500 à 1000 cellules. Ces différentes combinaisons sont réalisées avec des cellules dites « passives » et des cellules dites « actives ». Les cellules passives préfigurent les cellules de peau et les cellules actives préfigurent les cellules cardiaques qui seront utilisées lors des manipulations in vitro ; ces dernières assurant la mobilité du biorobot grâce à leurs capacités à se contracter et se détendre spontanément. Elles se comportent ainsi comme des moteurs miniatures, capables d’entraîner l’ensemble, jusqu’à épuisement de leurs réserves d’énergie (Figure 1).
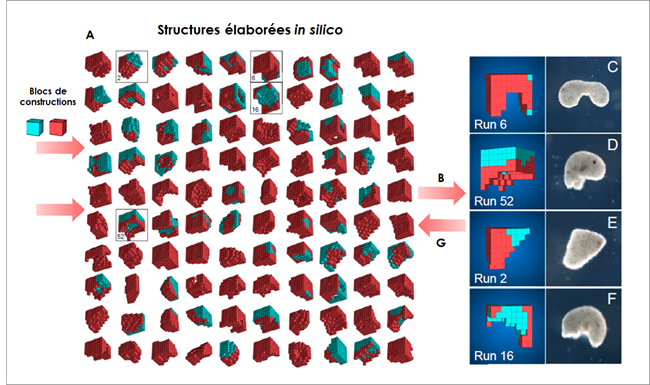
Figure 1 : Conception et production d’organismes reconfigurables. Au départ, un objectif comportemental (tel que « maximiser le déplacement » par exemple) est préétabli. Des blocs virtuels de construction structurels sont fournis à l’algorithme évolutionniste (ici des blocs passifs en bleu et des blocs contractiles en rouge). L’algorithme construit une première population aléatoirement et sélectionne parmi celle-ci les meilleures configurations permettant d’atteindre l’objectif fixé (A). Au cours de cette expérimentation, l’algorithme a été réexécuté 99 fois en démarrant le processus avec une population aléatoire à chaque fois, permettant ainsi la création d’une multitude de configurations différentes in silico. Les configurations les plus performantes vis-à-vis de l’objectif visé sont ensuite sélectionnées (B) et reproduites in vivo en utilisant des cellules progénitrices cardiaques et épithéliales (C-F). Ces cellules sont assemblées afin de reproduire la forme et la structure identifiée in silico, et disposées sur la surface d’une boîte de Pétri où leur comportement est observé et comparé au comportement prédit par l’algorithme. Les éventuelles différences de comportement entre les structures in silico et in vivo sont répertoriées et peuvent être retourner à l’algorithme évolutionniste sous forme de contraintes structurelles (G) qui peuvent ensuite être utilisées lors de nouvelles simulations.
Chaque configuration est ensuite testée dans un environnement virtuel, afin de visualiser, par exemple, jusqu’où la structure peut se déplacer lorsque les cellules cardiaques se contractent. Les meilleures configurations sont améliorées, puis réalisées[1]. Pour ce faire, des cellules souches pluripotentes sont récoltées à partir d’un bourgeon embryonnaire de Xenopus laevis[2]. Ces cellules sont dissociées et regroupées afin d’obtenir le nombre de cellules souhaité. Après une période d’incubation, le tissu agrégé est ensuite façonné manuellement par soustraction à l’aide d’une combinaison de pinces de microchirurgie et d’une électrode de cautérisation. Les biologistes y incorporent des cellules progénitrices cardiaques qui se développent naturellement en cellules musculaires cardiaques.
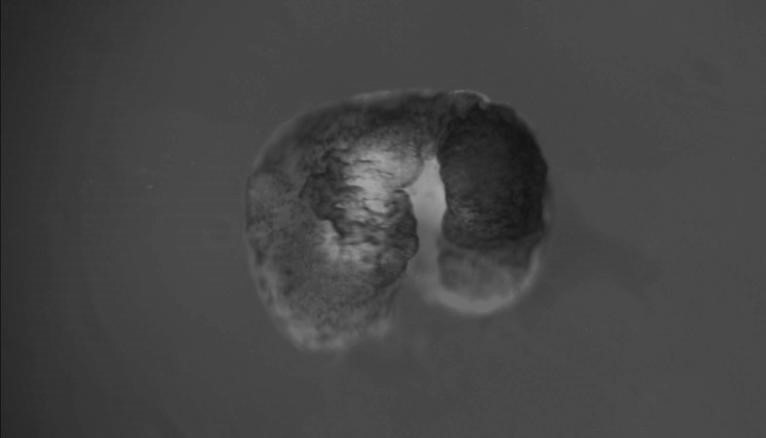
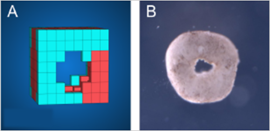
Au cours de l’expérience, une dizaine de « xénorobots » ont été testés. L’une des créations les plus surprenantes possède deux pattes trapues qui la propulsent (Figure 2, à gauche), une autre dispose d’une poche pour transporter des charges utiles miniatures (Figure 2, à droite). Chaque spécimen dispose de suffisamment d’énergie pour survivre de façon autonome durant une dizaine de jours, mais leur durée de vie pourrait se prolonger de plusieurs semaines dans un environnement riche en nutriments, selon les chercheurs. Les xénorobots seraient en outre capables de « cicatriser » leurs blessures eux-mêmes.
Figure 2 : Représentation de structures générées et sélectionnées in silico (A) et les xénorobots élaborés in vivo (B). Source : PNAS – A scalable pipeline for designing reconfigurable organisms

Le potentiel de ces xénorobots à moyen et long terme semble multiple. Il est en effet tout à fait envisageable que ceux-ci puissent à terme, transporter des médicaments dans le corps humain, nettoyer des artères, mais aussi, pourquoi pas, collecter le plastique dans l’océan, digérer des substances nocives ou encore s’introduire là où l’humain ne peut le faire. Les chercheurs estiment également que, à l’avenir, il sera possible de doter les xénorobots de cellules nerveuses et sensorielles, permettant ainsi d’élargir notre compréhension de la façon dont les capacités cognitives apparaissent au sein des systèmes vivants, et comment ces mêmes fonctions pourraient être
[1] https://youtu.be/aQRBCCjaYGE
[2] Xenopus laevis est une espèce d’amphibiens très utilisée dans les laboratoires comme organisme modèle en biologie du développement.
